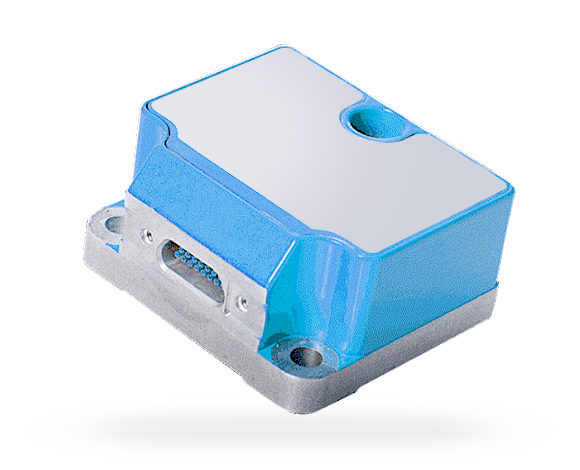
一、 产品介绍
启航彩 IVS318高精度惯性测量单元包含三轴高精度mems陀螺,三轴高精度mems加速度计以及三轴高精度倾角传感器,产品内置温度补偿、线性度标定和正交标定,提供高精度的惯导参数,内置的高精度倾角传感器,可以在安装时精确调平,安装尺寸、电气接口以及通信协议兼容STIM300。广泛应用于舰船、无人机、机器人、自动驾驶等领域。
二、 性能指标
加速度计参数
参数 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
加速度测量范围 |
| -10 |
| 10 | g |
|
分辨率 |
|
| 24 |
| bits |
|
标度因数精度 | T=25℃ |
| ±200 |
| ppm |
|
标度因数年重复性 |
|
| 500 |
| ppm |
|
标度因数温度漂移 | -40~+85℃ |
| ±300 |
| ppm | 1δ |
非线性 |
|
| 100 |
| ppm |
|
带宽 | -3dB |
| 200 |
| HZ |
|
采样率 | T=25℃ |
|
| 2000 | HZ |
|
零偏 | T=25℃ | -0.1 |
| 0.1 | mg |
|
零偏短期重复性 | 通断电 |
| 0.075 |
| mg |
|
零偏年重复性 |
|
| 1.2 |
| mg | 1δ |
零偏温度漂移 | -40~+85℃ |
| 0.7 |
| mg | 1δ |
零偏不稳定性 | 艾伦方差@T=25℃ |
| 0.003 |
| mg |
|
速度随机游走 | 艾伦方差(10s)@T=25℃ |
| 0.015 |
| m/s/√h |
|
振动整流误差 | 10grms,20~2000HZ | 0.1 |
| 0.5 | mg/g2 |
|
安装失准角 |
|
| 1 |
| mrad |
|
三轴正交度 |
|
| 0.2 |
| mrad |
|
陀螺仪参数
参数 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
角速率测量范围 |
| -400 |
| 400 | °/s |
|
分辨率 |
|
| 24 |
| bits |
|
标度因数精度 | T=25℃ |
| ±500 |
| ppm |
|
标度因数重复性 | T=25℃ |
| 50 |
| ppm | 间隔24小时 |
标度因数温度漂移 | -40~+85℃ |
| 300 |
| ppm | 1δ |
非线性 | ±200°/s |
| 15 |
| ppm |
|
±400°/s |
| 20 |
| ppm |
|
带宽 | -3dB |
| 250 |
| HZ |
|
采样率 | T=25℃ |
|
| 2000 | HZ |
|
零偏重复性 | T=25℃ |
| 0.5 |
| °/h | 间隔24小时 |
零偏温度漂移 | -40~+85℃ |
| 9 |
| °/h | 1δ |
零偏不稳定性 | 艾伦方差@T=25℃ |
| 0.3 |
| °/h |
|
角度随机游走 | 艾伦方差@T=25℃ |
| 0.15 |
| °/√h |
|
零偏稳定性 | 10s平均 |
| 3 |
| °/h |
|
零偏加速度灵敏度 |
|
| 1 |
| °/h/g |
|
振动整流误差 | 12grms,20~2000HZ |
| 1 |
| °/h/g2 |
|
安装失准角 |
|
| 1 |
| mrad |
|
三轴正交度 |
|
| 0.2 |
| mrad |
|
倾角传感器参数
参数 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
加速度测量范围 |
| -2 |
| 2 | g |
|
分辨率 |
|
| 24 |
| bits |
|
标度因数精度 | T=25℃ |
| ±500 |
| ppm |
|
标度因数年重复性 |
|
| 2000 |
| ppm |
|
标度因数温度漂移 | -40~+85℃ |
| ±300 |
| ppm | 1δ |
非线性 | ±1g |
| 100 |
| ppm |
|
带宽 | -3dB |
| 20 |
| HZ |
|
采样率 | T=25℃ |
|
| 2000 | HZ |
|
零偏 | T=25℃ | -0.1 |
| 0.1 | mg |
|
零偏短期重复性 | 通断电 |
| 0.1 |
| mg |
|
零偏温度漂移 | -40~+85℃ |
| 1 |
| mg | 1δ |
零偏不稳定性 | 艾伦方差@T=25℃ |
| 0.01 |
| mg |
|
速度随机游走 | 艾伦方差@T=25℃ |
| 0.03 |
| m/s/√h |
|
安装失准角 |
|
| 1 |
| mrad |
|
三轴正交度 |
|
| 0.2 |
| mrad |
|
温度传感器参数
参数 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
分辨率 |
|
| 0.012 |
| ℃ |
|
精度 | -40~+85℃ |
| ±10 |
| ℃ |
|
采样率 |
|
|
| 2000 | HZ |
|